- Optimizing Operations
- blog
Discover the best use-case scenarios for Autonomous Mobile Robots

Some 70% of warehouse operations are estimated to be manual, notes LDV Capital in a recent report. Similarly, some of Gideon Brothers’ clients have reported that their logistics center employees spend well over half of their work time transporting goods from point A to point B.
It’s easy to see why automation is not just a trend but a “must-do” in today’s logistics and manufacturing environments. The sectors face labor shortages and rising wages, as well as changes to work safety regulations, which constrain operations and growth potential.
Gideon Brothers’ pallet handling robot relieves some of this pressure by offering a plug-and-play, self-driving alternative to the transfer forklift and similar vehicles that require a driver. Moreover, it does so at a cost that is equal to 69-76% of the cost of a forklift and driver across three shifts (as calculated for a number of EU countries), and it offers customers the potential for additional data acquisition opportunities – such as inventory or security – to further offset deployment costs.
Thanks to its visual perception, Gideon Brothers’ robot performs better than those based on LiDAR (laser) sensors for navigation in typical dynamic manufacturing and warehouse environments. Below are the most common use-cases for different transportation and picking approaches.
‘On demand’ transportation approach

Autonomous mobile robots transport pallets or other objects from ‘start’ to ‘end’ location’ as required, on demand. Transportation actions can be triggered either manually by an employee using an interface, or automatically in case of integration with the user’s Warehousing Management System (WMS) or another software platform. The start and end points can be set up manually through the interface app, or, depending on the integration level, automatically by the system.
Who this is for: Companies who want to automate specific transportation operations or tasks. The integration between the robot interface and Warehouse Management System is optional.
Efficiencies gained: The need for the human operator is cut entirely for selected transportation tasks.
Example: Warehouse IN and Warehouse OUT processes
Gideon Brothers’ pallet-carrier robots transport pallets from inbound ramps to specific warehouse zones, where the goods are then placed by employees to the appropriate rack pallet position. In the reverse process, outbound palleted orders are transported from pick up points in specific warehouse zones to the outbound ramps.
Real-life Examples:
DB Schenker, a leading global logistics group, has piloted Gideon Brothers’ pallet-handling robots at their Leipzig contract logistics facility. The use-case saw the robots transporting the packaging materials to the packing stations, thus speeding up the order fulfillment process.
Tokić, a leading Croatian car-parts retailer, deployed Gideon Brothers’ robot to transport materials in its logistics and distribution center near Zagreb, Croatia. Tokić is employing an On-Demand approach. The first use case engages the robot in service of order fulfillment – delivering articles stored in the warehouse to a packing area. The other use case employs the robot to deliver packing material for disposal. Read the full Tokić case study.
Goods-to-Person picking approach

Autonomous mobile robots transport goods from their regular storage place to a central commissioning area where pickers extract the items required to fulfill a customer order. Once the goods are extracted, the robot returns the pallet to its storage place.
Who this is for: Companies that want to automate picking, but also want to avoid capital-intensive fixed automated storage and retrieval systems (e.g., carousels or shuttle systems).
Efficiencies gained: Pick time & number of orders processed increase. Eliminating the need to walk from one end of the warehouse to the other in order to fill orders reduces the time required to fulfill those orders – leading to higher volume throughput.
Example: Contract Packing Use Case
Gideon Brothers’ autonomous mobile robots transport pallets from different warehouse zones to the central co-packing area and then transport the pallets back to the appropriate warehouse zone. The process is triggered by an employee in a warehouse zone after they drop the pallet that is to be transported to a pallet stand from which it can be picked up by a robot and taken to the co-packing area. The reverse process is triggered by the employee in the co-packing area to send a pallet to the appropriate warehouse zone.
Person-to-Goods picking approaches
The majority of distribution centers rely on Person-to-Goods picking approaches. In this approach, workers go out onto the floor to collect what they require to fulfill orders. In typical Person-to-Goods scenarios, they spend up to 60% of their time traveling and 40% picking. Improved efficiency is achieved primarily by reducing travel time and increasing order accuracy.
‘Lead me’ approach
The robot fleet is integrated with a customer’s WMS software from which it receives its picking orders. Each robot is assigned to a picker. The robot leads the (human) picker from one pick location to the next. A tablet is affixed to the robot, displaying the goods that must be picked at each location to fulfill the order.
Who this is for: Warehouse operations that want to keep the Person to Goods picking system and can integrate their WMS software with the robotic system. Robots increase efficiency and accuracy and allow the worker free movement, without the need to lug carts or operate forklifts.
Efficiencies gained: Travel time is shortened, especially in operations where performance indicators for travel time between pick locations are below industry benchmarks. Order accuracy is raised. Further time savings are achieved by cutting out the last ‘leg’ of travel in the fulfillment process – once an order is completed, the robot proceeds to the dispatch area by itself, and the picker proceeds with the next robot to fulfill the next order.
‘Follow me’ approach

In this scenario, the robot follows a picker from one picking location to another, using only its cameras. With this approach, the robot doesn’t need integration with a user’s WMS, and the company doesn’t need to change the way it distributes picking orders to employees. Once the picker completes an order, they can send the robot to drop off the goods to a designated location.
Who this is for: Companies that want to continue using their existing order fulfillment system without the need to integrate autonomous robots with their Warehouse Management Systems. Robots still increase efficiency, allow tracking of performance indicators, and would allow the worker free movement, without the need to lug carts or operate forklifts.
Efficiencies gained: Time savings are achieved by cutting out the last ‘leg’ of travel in the fulfillment process – once an order is completed, the robot proceeds to the dispatch area by itself, and the picker proceeds with the next robot to fulfill the next order. Efficiency is further raised indirectly, thanks to improved tracking of performance indicators (the robot can record data such as route and travel time for each worker), also unveiling room for further improvements in the entire process.
The Follow Me approach is being used at the deployment at Croatia Post. The solution is deployed in a high-rack warehouse and a sorting facility. In the warehouse, the robots assist with the picking and transport of mail; in the sorting facility, robots transport mail from vehicles to processing locations that prepare mail and packages for delivery.
‘Swarm me’ approach
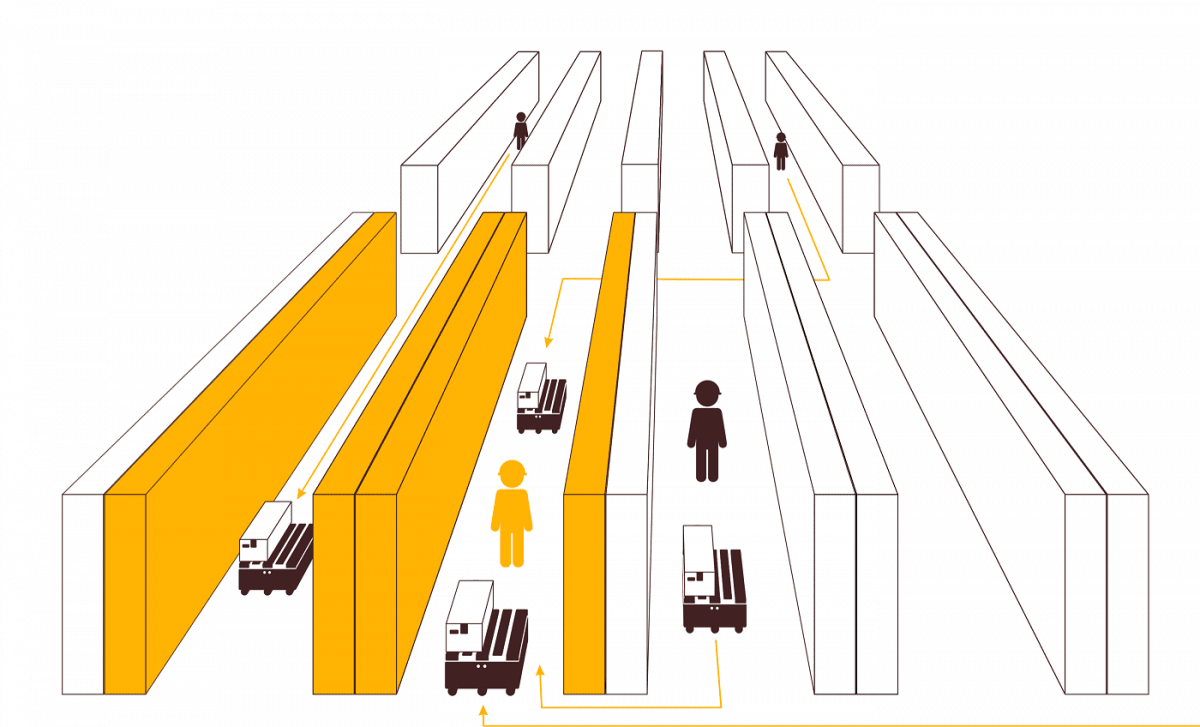
Each picker is assigned to a single warehouse zone, and the robots travel autonomously from one zone to another and from one zone picker to another. The mobile robot is integrated with the Warehousing Management System from which it receives picking orders and it is equipped with a touchscreen or a similar device. As the robot reaches a warehouse zone, the picker reads the task from the screen, picks the good(s) required to fulfill the customer’s order, and then adds the good(s) to the pallet. From there, the robot moves on to the next pick location until the order is complete. Once complete, the mobile robot travels to a packing area and the order is prepped for shipping.
Who this is for: Companies that are looking for ways to increase the speed of order fulfillment by integrating WMS with the robot fleet.
Efficiencies gained: Travel time for workers is reduced to a minimum, as each worker stays in a single zone, and robots move from one zone to the next. Order accuracy is also increased.
Learn more!
Not sure what to ask your supplier to avoid unknown pitfalls?
Take a look at our e-book that covers all available warehouse automation. You will find an overview of market trends, available technologies, a comprehensive self-assessment checklist, and everything you need to know about material handling robots.